


今回は「糸コンベア」という機構の製作に絞って書きたいと思います。ふつうのコンベアとは違い、糸コンベアは製品を「面」ではなく「線」で搬送します。なぜわざわざ線で製品を支えるのか?そのメリットは:
- 下からも撮影できるので上下両面から検査できる。
- バックライトを下につけることで透過光による撮影ができる
- 2つの糸の速度を変えることで製品を回転させることができる
など、様々です。
製作期間:1日半
材料費 :3~4万円
材料・部品
(モーター部)
- スピードコントロールモーター [パナソニック/MUSN715GL]
- 新Gシリーズ ギヤヘッド [パナソニック/MX7G30M]
- モーター取り付けステー [パナソニック/M7B2]
(糸コンベア部)
- マルベルト [ミスミ/MBT2-800]:2本
- 回転軸 [ミスミ/PSFMRW5-250-MD3-N3]:2本
- ベアリングホルダセット [ミスミ/BGLKA605DD-25]:2個
- マルベルトプーリー [ミスミ/MBRAC30-1-5]:2個
- コンパクトセットカラー [ミスミ/PSCBSJ5-8]:2個
- シャフトホルダ [ミスミ/SHSTA5-25]:2個
- マルベルトアイドラー [ミスミ/MBFA30-1.1]:2個
- カップリング [ミスミ/CPRC25-8-10]
- C-VALUEカップリング [ミスミ/GCO20-5-8]
- メッキシャフト [ミスミ/PSFJ8-20]
- アルミフレーム [ミスミ/HFS5-2060-150]:3本
- アルミフレーム [ミスミ/HFS5-2040-500]:2本
- アルミフレームブラケット [ミスミ/HBLFSSW5]:5個
- 六角穴付ボルト M3 [ミスミ/S3-10-P]:4個
- アルミフレーム用バネナット[ミスミ/HNTP5-3]:4個
- 六角穴付ボルト M4 [ミスミ/S4-10-P]:8個
- アルミフレーム用バネナット[ミスミ/HNTP5-4]:8個
- 六角穴付ボルト M5 [ミスミ/S4-10-P]:20個
- アルミフレーム用バネナット[ミスミ/HNTP5-4]:20個
材料・部品計:4万円
工具・備品
- ドライバ、六角レンチセット
工具・備品計:3千円程度
作り方
今回は切ったり貼ったりはありません。手配した各部品をドライバと六角レンチで組み立てていくのが基本となります。
モーター部を組み立てる
モーター部はスピードコントロールモーター、ギヤヘッド、ステーで構成されます。ギヤヘッドに付属のネジで組み立てます。ネジを回転させながら搬送する用途に合わせてギア比は大きいもの(1/30)を選定しました。因みにギア比 1/30 ですと最速でも60rpm程度です。


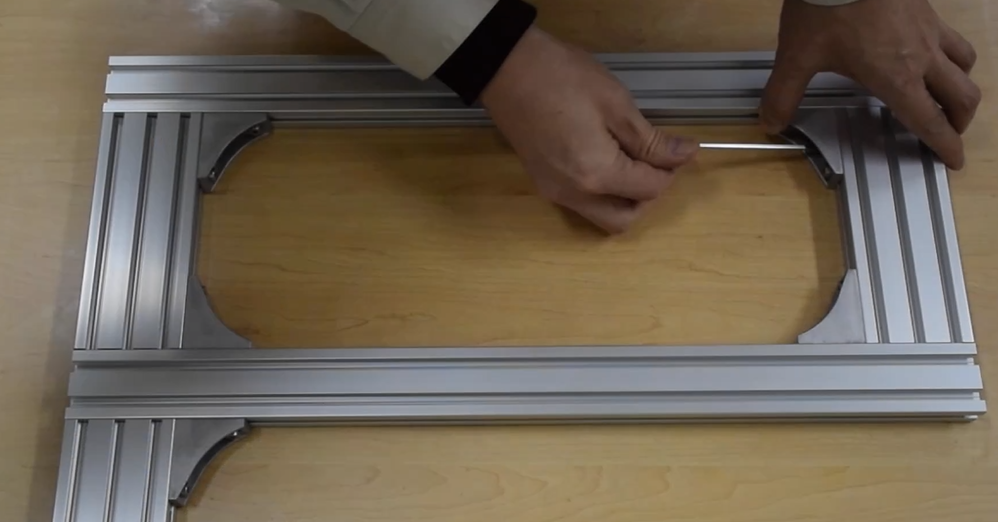
アルミフレームを組み立てる
アルミフレームや機構部品はミスミから様々な種類のものをワンストップで手配することができます。今回は5シリーズという、M5のボルトで組み立てるタイプのフレームを使いました。予め長さを指定して購入したフレームをネジとブラケットで組み立てていきます。
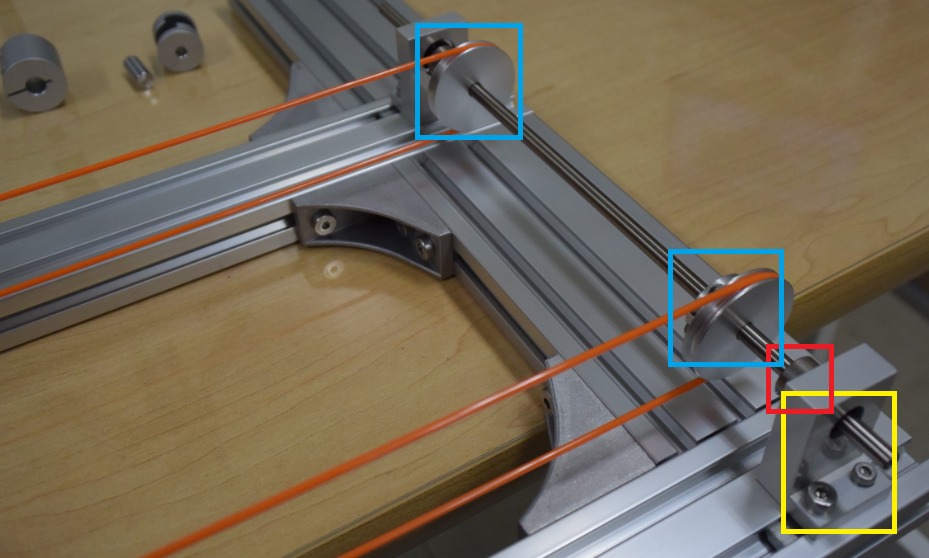
軸を組み立てる
動力側(モーターを取り付ける側)の軸は回転して全てのプーリー(水色)に動力を伝えます。そのため軸をベアリング(黄色)で保持し、プーリーを軸に固定します。また、軸がベアリングから抜けないようにセットカラーを取り付けます。
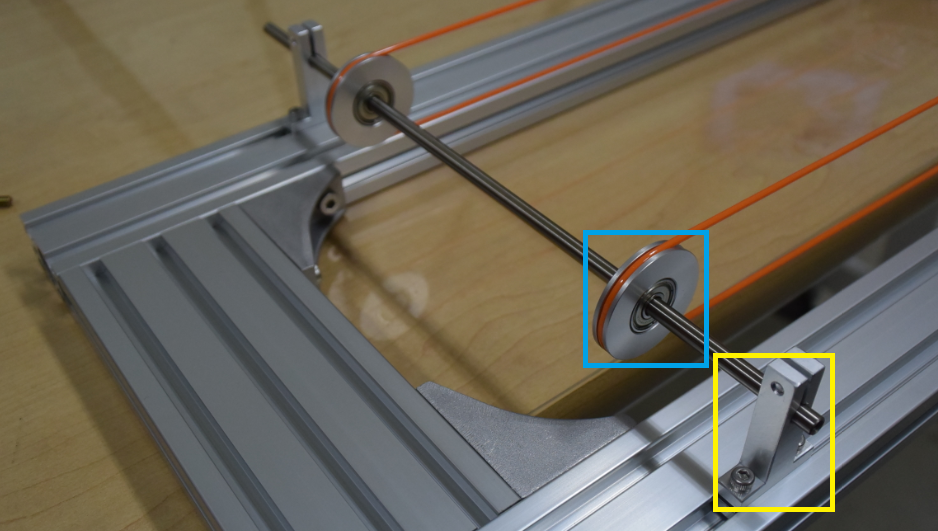
一方、動力側でない軸は回転する必要がないのでシャフトホルダー(黄色↓)で固定します。軸に取り付けられたアイドラー(水色↓)は回転する必要があるので軸の部分にベアリングが付いています。
モーターと接続する
モーター部の軸がΦ10mm、コンベア部の軸がΦ5mmで、10mm→5mmをつなぐカップリングがなかったため10→8mmと8→5mmのカップリングを使って接続しました。

接続すると下の図のようになります。
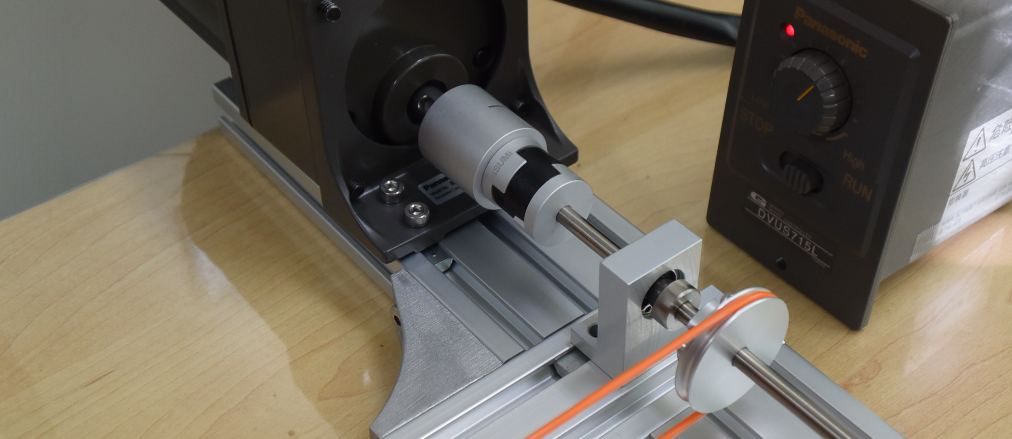
これで完成です。
糸コンベアの応用
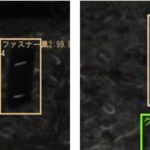
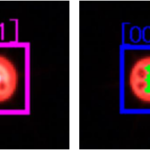
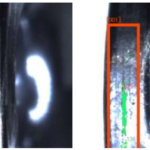
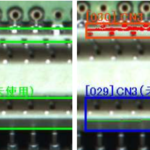
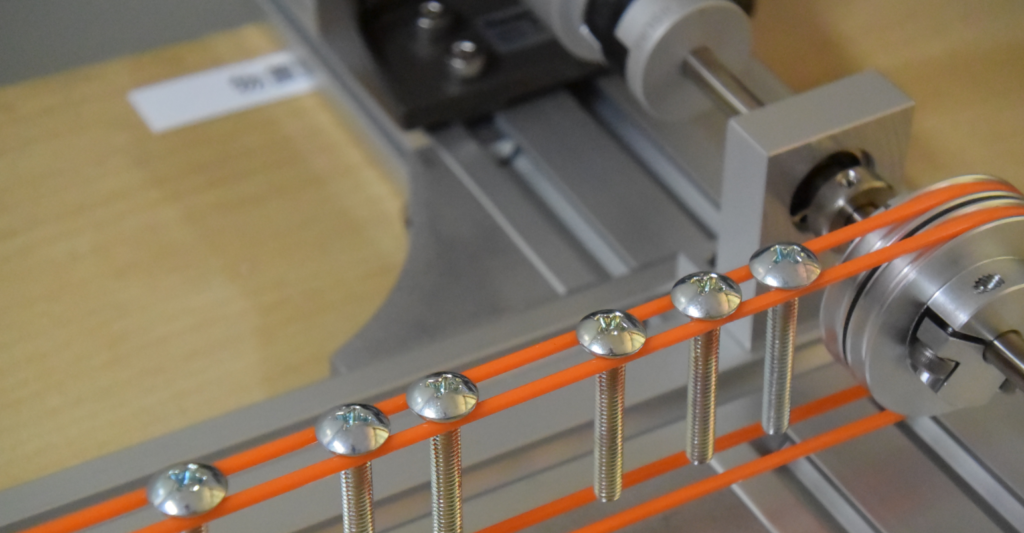
冒頭に書いたように、糸コンベアを使うと上下両面から検査できたり、バックライトで下面から照明を当てたり、ネジを回転させながら搬送したりすることができます。下の写真は幅を狭くしてネジの頭を保持している例です。2つのベルトを動かせばそのまま搬送、片方だけを動かせばネジは回転しながら搬送されます。この性質を利用すると搬送されるネジ山のダコンをぐるっと検査することができます。

いかがでしたでしょうか。今後の記事ではこの機構を使って色々な自動検査の事例を挙げていきたいと思います。